All experimental data contains noise. Distinguishing between measurement and noise is an important component of any data analysis pipeline. However, different noise-filtering techniques are suited to different categories of noise.
In this post, I’ll show you a class of filtering techniques, based on discrete wavelet transforms, which is suited to noise that cannot be filtered away with more traditional techniques – such as ones that rely on the Fourier transform. This has been important in my past research1 2, and I hope that this can help you too.
Integral transforms
A large category of filtering techniques are based on integral transforms. Broadly speaking, an integral transform is an operation that is performed on a function , and builds a new function which is defined on a variable , such that:
Here, (for kernel) is a function which “selects” which parts of are important at a fixed . Note that for an integral transform to be useful as a filter, we’ll need the ability to invert the transformation, i.e. there exists an inverse kernel such that:
All of this was very abstract, so let’s look at a concrete example: the Fourier transform. The Fourier transform is an integral transform where3:
There are many other integral transforms, such as:
- The Laplace transform (), which is useful to solve linear ordinary differential equations;
- The Legendre transforms (, where is the nth Legendre polynomial) which is used to solve for electron motion in hydrogen atoms;
- The Radon transform (for which I cannot write down a kernel), which is used to analyze computed tomography data.
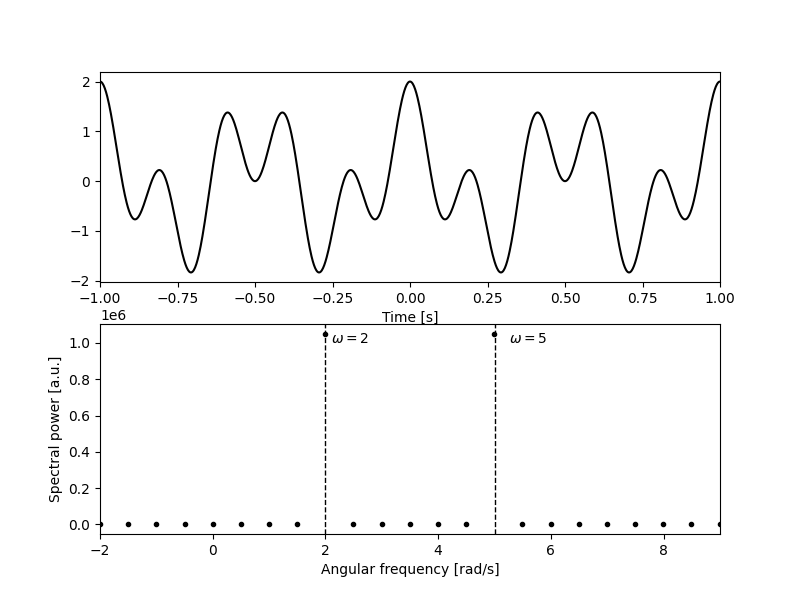
So why are integral transforms interesting? Well, depending on the function you want to transform, you might end up with a representation of in the transformed space, , which has nice properties! Re-using the Fourier transform for a simple, consider a function made up of two well-defined frequencies:
The representation of in frequency space – the Fourier transform of , – is very simple:
The Fourier transform of is perfectly localized in frequency space, being zero everywhere except at and . Functions composed of infinite waves (like the example above) always have the nice property of being localized in frequency space, which makes it easy to manipulate them… like filtering some of their components away!
Discretization
It is much more efficient to use discretized versions of integral transforms on computers. Loosely speaking, given a discrete signal composed of terms , …, :
i.e. the integral is now a finite sum. For example, the discrete Fourier transform of the signal , , can be written as:
and its inverse becomes:
This is the definition used by numpy. Let’s use this definition to compute the discrete Fourier transform of :
Using the discrete Fourier transform to filter noise
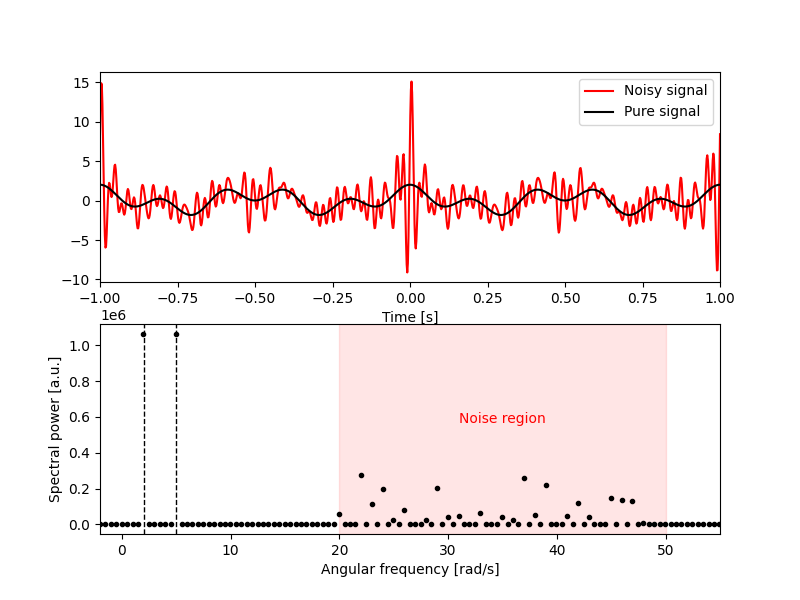
Let’s add some noise to our signal and see how we can use the discrete Fourier transform to filter it away. The discrete Fourier transform is most effective if your noise has some nice properties in frequency space. For example, consider high-frequency noise:
where are random phases, one for each frequency component of the noise. While the signal looks very noisy, it’s very obvious in frequency-space what is noise and what is signal:
The basics of filtering is as follows: set the transform of a signal to 0 in regions which are thought to be undesirable. In the case of the Fourier transform, this is known as a band-pass filter; frequency components of a particular frequency band are passed-through unchanged, and frequency components outside of this band are zeroed. Special names are given to band-pass filters with no lower bound (low-pass filter) and no upper bound (high-pass filter). We can express this filtering as a window function in the inverse discrete Fourier transform:
In the case of the plot above, we want to apply a low-pass filter with a cutoff at . That is:
Visually:
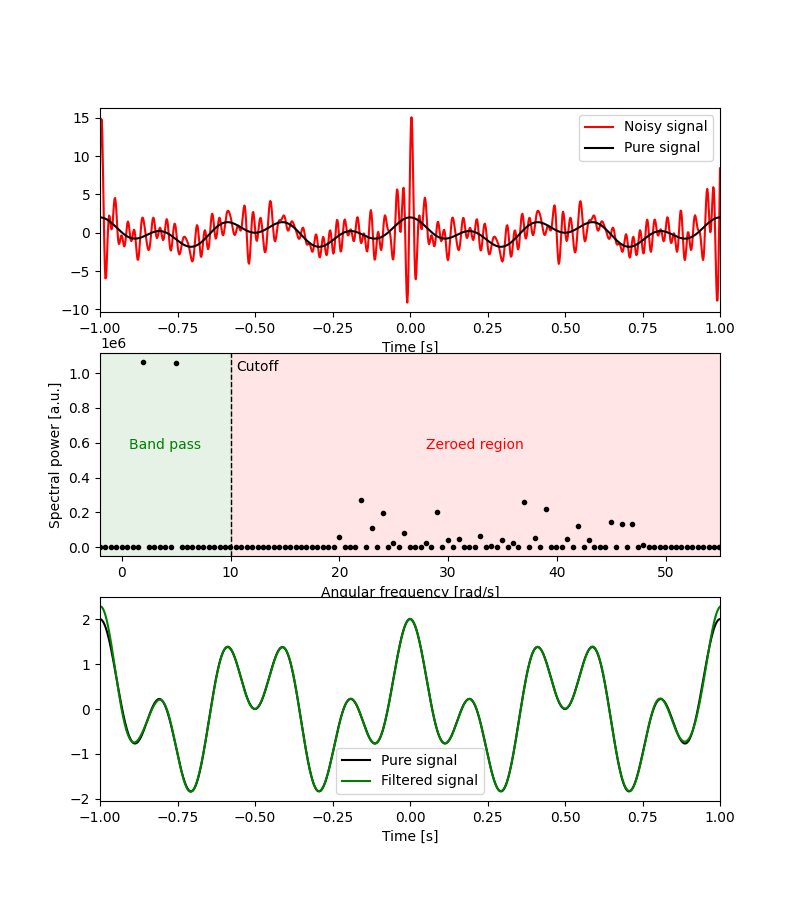
The lesson here is that filtering signals using a discretized integral transform (like the discrete Fourier transform) consists in:
- Performing a forward transform;
- Modifying the transformed signal using a window function, usually by zeroing components;
- Performing the inverse transform on the modified signal.
Discrete wavelet transforms
Discrete wavelet transforms are a class of discrete transforms which decomposes signals into a sum of wavelets. While the complex exponential functions which make up the Fourier transform are localized in frequency but infinite in space, wavelets are localized in both time space and frequency space.
In order to generate the basis wavelets, the original wavelet is stretched. This is akin to the Fourier transform, where the sine/cosine basis functions are ‘stretched’ by decreasing their frequency. In technical terms, the amount of ‘stretch’ is called the level. For example, the discrete wavelet transform using the db44 wavelet up to level 5 is the decomposition of a signal into the following wavelets:
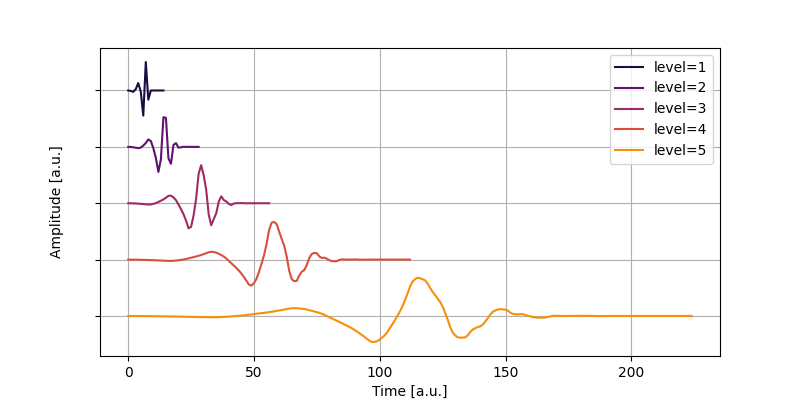
In practice, discrete wavelet transforms are expressed as two transforms per level. This means that a discrete wavelet transform of level 1 gives back two sets of coefficients. One set of coefficient contains the low-frequency components of the signal, and are usually called the approximate coefficients. The other set of coefficients contains the high-frequency components of the signal, and are usually called the detail coefficients. A wavelet transform of level 2 is done by taking the approximate coefficients of level 1, and transforming them using a stretched wavelet into two sets of coefficients: the approximate coefficients of level 2, and the detail coefficients of level 2. Therefore, a signal transformed using a wavelet transform of level has sets of coefficients: the approximate and detail coefficients of level , and the detail coefficients of levels , , …, .
Filtering using the discrete wavelet transform
The discrete Fourier transform excels at filtering away noise which has nice properties in frequency space. This is isn’t always the case in practice; for example, noise may have frequency components which overlap with the signal we’re looking for. This was the case in my research on ultrafast electron diffraction of polycrystalline samples5 6, where the ‘noise’ was a trendline which moved over time, and whose frequency components overlapped with diffraction pattern we were trying to isolate.
As an example, let’s use real electron diffraction data and we’ll pretend this is a time signal, to keep the units familiar. We’ll take a look at some really annoying noise: normally-distributed white noise drawn from this distribution7:
Visually:
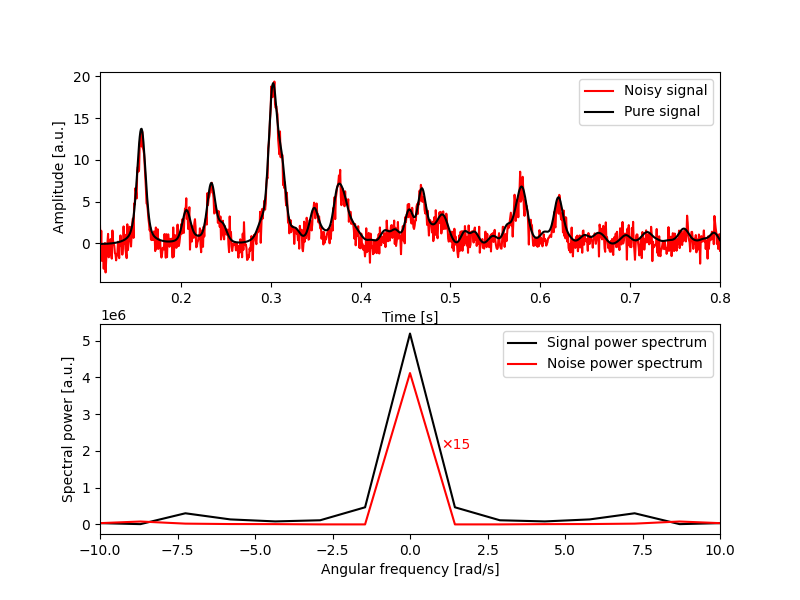
This example shows a common situation: realistic noise whose frequency components overlap with the signal we’re trying to isolate. We wouldn’t be able to use filtering techniques based on the Fourier transform.
Now let’s look at a particular discrete wavelet transform, with the underlying wavelet sym17. Decomposing the noisy signal up to level 3, we get four components:
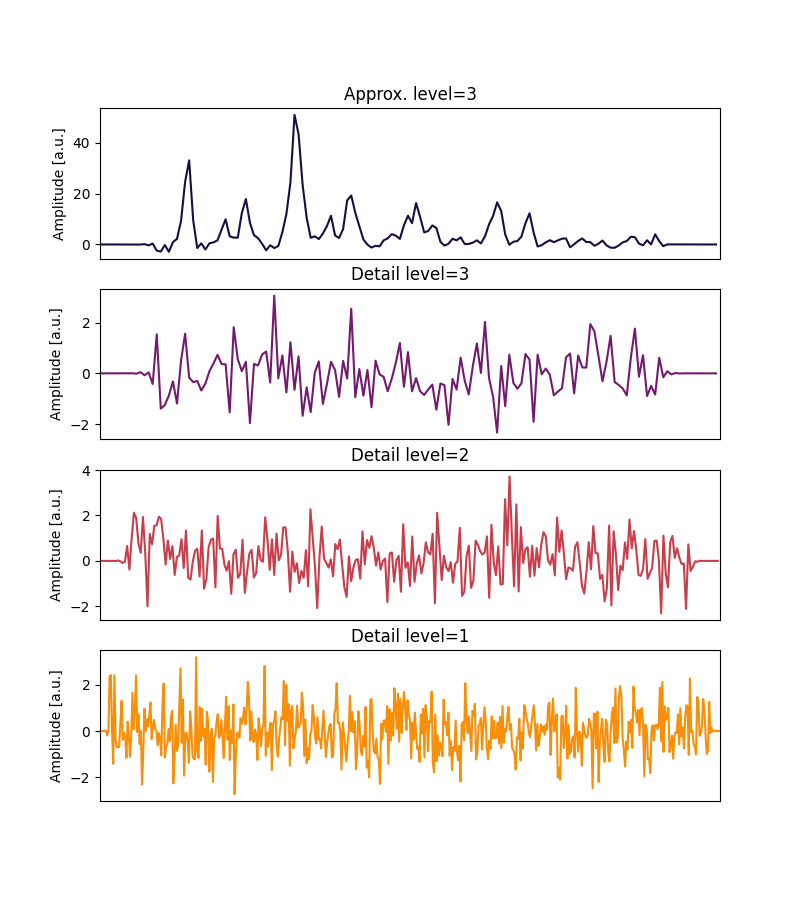
Looks like the approximate coefficients at level 3 contain all the information we’re looking for. Let’s set all detail coefficients to 0, and invert the transform:
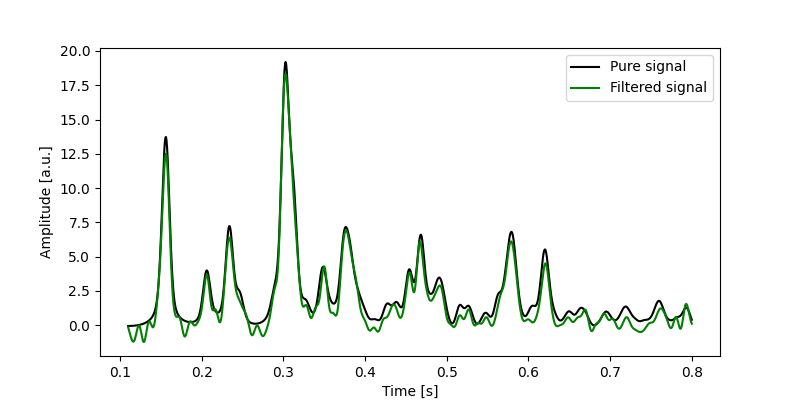
That’s looking pretty good! Not perfect of course, which I expected because we’re using real data here.
Conclusion
In this post, I’ve tried to give some of the intuition behind filtering signals using discrete wavelet transforms as an analogy to filtering with the discrete Fourier transform.
This was only a basic explanation. There is so much more to wavelet transforms. There are many classes of wavelets with different properties, some of which8 are very useful when dealing with higher-dimensional data (e.g. images and videos). If you’re dealing with noisy data, it won’t hurt to try and see if wavelets will help you understand it!
L. P. René de Cotret and B. J. Siwick, A general method for baseline-removal in ultrafast electron powder diffraction data using the dual-tree complex wavelet transform, Struct. Dyn. 4 (2017) DOI:10.1063/1.4972518↩︎
M. R. Otto, L. P. René de Cotret, et al, How optical excitation controls the structure and properties of vanadium dioxide, PNAS (2018) DOI: 10.1073/pnas.1808414115.↩︎
Note that it is traditional in physics to represent the transform variable as instead of . If is time (in seconds), then is angular frequency (in radians per seconds). If is distance (in meters), is spatial angular frequency (in radians per meter).↩︎
I will be using the wavelet naming scheme from PyWavelets.↩︎
L. P. René de Cotret and B. J. Siwick, A general method for baseline-removal in ultrafast electron powder diffraction data using the dual-tree complex wavelet transform, Struct. Dyn. 4 (2017) DOI:10.1063/1.4972518↩︎
M. R. Otto, L. P. René de Cotret, et al, How optical excitation controls the structure and properties of vanadium dioxide, PNAS (2018) DOI: 10.1073/pnas.1808414115.↩︎
Note that this distribution contains a bias of -, which is useful in order to introduce low-frequencies in the noise which overlap with the spectrum of the signal.↩︎
N. G. Kingsbury, The dual-tree complex wavelet transform: a new technique for shift invariance and directional filters, IEEE Digital Signal Processing Workshop, DSP 98 (1998)↩︎